Claudio Coppola
Claudio Coppola
Home
Posts
Projects
Talks
Publications
Contact
Light
Dark
Automatic
activity-recognition
Master of Puppets: Multi-modal Robot Activity Segmentation from Teleoperated Demonstrations
The paper proposes a method using motion and tactile features to automatically segment atomic actions from teleoperated demonstrations for complex robotic tasks, provides a dataset of pick-and-place teleoperation with a dexterous hand, and shows the proposed features generalize between episodes and similar objects while tactile sensing improves activity recognition within demonstrations.
Claudio Coppola
,
Lorenzo Jamone
Cite
Dataset
Video
Social activity recognition on continuous RGB-D video sequences
Modern service robots are provided with one or more sensors, often including RGB-D cameras, to perceive objects and humans in the …
Claudio Coppola
,
Serhan Cosar
,
Diego R Faria
,
Nicola Bellotto
PDF
Cite
Code
Dataset
Video
UoL 3D Continuous Social Activity Dataset
Dataset is composed of 20 long RGB-D videos. Each video provides RGB-D images and tracked skeleton of different social and individual activities performed by two people.
PDF
Code
Video
Dataset
Follow
Connect
UoL 3D Social Interaction Dataset
Dataset of 10 episodes containing a sequence of individual/social interactions in an indoor environment.
PDF
Code
Video
Dataset
Follow
Connect
Learning Temporal Context for activity recognition
Experiments for the ECAI 2016 publication. The experiments show different approaches for learning spatio-temporal context for indoor activity recognition.
Experiments Code
Python Fremen Code
ISR-UoL 3D Social Activity Dataset
This is a social interaction dataset between two subjects. This dataset consists of RGB and depth images, and tracked skeleton data (i.e. joints 3D coordinates and rotations) acquired by an RGB-D sensor.
PDF
Code
Video
Dataset
Follow
Connect
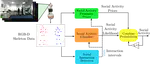
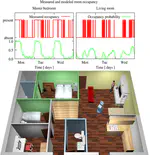
Learning temporal context for activity recognition
We investigate how incremental learning of long-term human activity patterns improves the accuracy of activity classification over …
Claudio Coppola
,
Tomas Krajnik
,
Tom Duckett
,
Nicola Bellotto
PDF
Cite
Code
Social activity recognition based on probabilistic merging of skeleton features with proximity priors from RGB-D data
The paper presents a probabilistic approach using spatio-temporal and social features to recognize human-human interaction activities, learns priors based on proxemics theory to improve classification, and provides a new public RGB-D dataset of social activities including risk situations, with results showing the proposed method merging different features and proximity priors improves precision, recall and accuracy over alternative approaches
Claudio Coppola
,
Diego R Faria
,
Urbano Nunes
,
Nicola Bellotto
PDF
Cite
Code
Dataset
Video
Cite
×