Claudio Coppola
Robotics And Machine Learning Scientist
Senior Research Engineer @ Thehumanoid.ai
Biography
Claudio Coppola is an artificial intelligence and robotics expert with strong academic credentials and industry experience. He specializes in applying advanced machine learning techniques to enable more intelligent robot systems.
Claudio obtained his PhD in Robotics from the University of Lincoln in 2018, where his doctoral research focused on human activity understanding to assist robots in indoor environments. He also holds a Master’s degree cum laude in Computer Engineering from the University of Naples Federico II in Italy. His work has led to numerous publications in leading journals and conferences like ICRA, IROS and IJSR.
During his experience as Applied Scientist at Amazon Transportation Services. Claudio has developed cutting-edge machine learning solutions for forecasting and pricing optimization. Previously at Queen Mary University of London, he researched robot learning for manufacturing automation. His work on tactile perception, teleoperation and learning from demonstrations aimed to enable adaptable industrial robots. With his technical expertise and passion for AI robotics, Claudio is an asset in initiatives fusing intelligent systems with automation.
- Robot-learning
- Human-Activity-Recognition
- Machine-Learning
- Time Series Forecasting
- Robotic-Perception
PhD in Robotics, 2018
University of Lincoln
MSc in Computer Science Engineering, 2013
Universitá degli studi di Napoli Federico II
BSc in Computer Science Engineering, 2011
Universitá degli studi di Napoli Federico II
Experience
Lead Instructor for the AI and Data Science courses.
- Delivered the Course material to professionals interested in changing their career towards data oriented and AI-dependant roles.
- Advised students on their final project, objectives, and data choices.
- Performed reseach and supported PhD and Master students as member of the Advanced Robotics Queen-Mary (ARQ) Team.
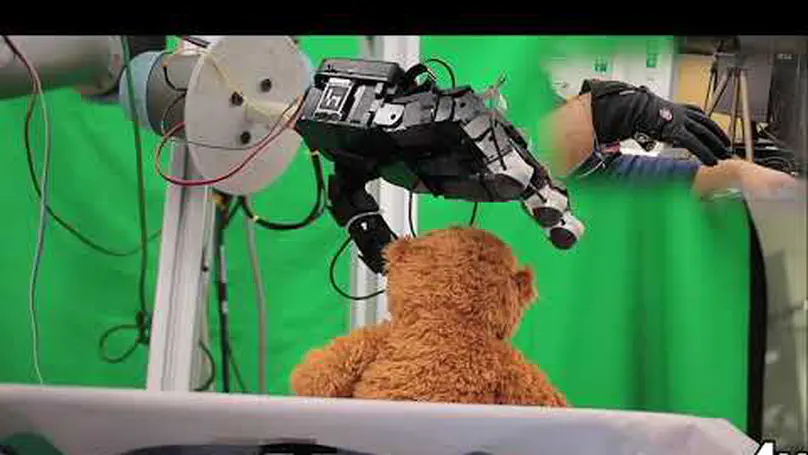
- Contributed to and Coordinated the work of PhD/MSc students for the EPSRC MAN3 Project, involving Shadow Robotics, Ocado and Google Deepmind.
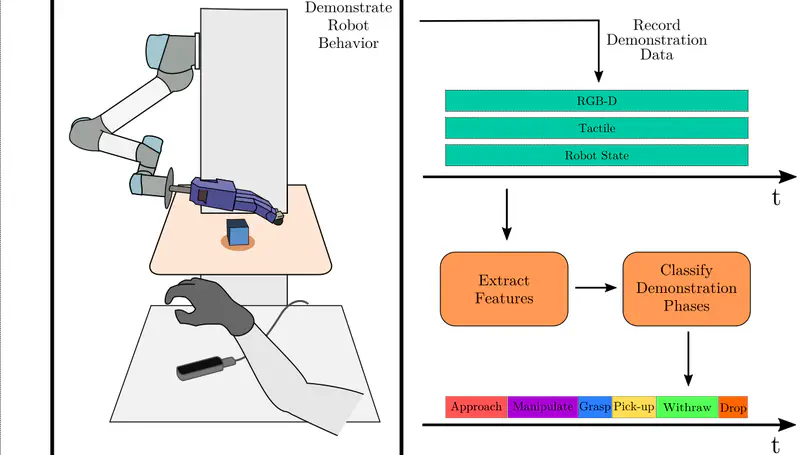
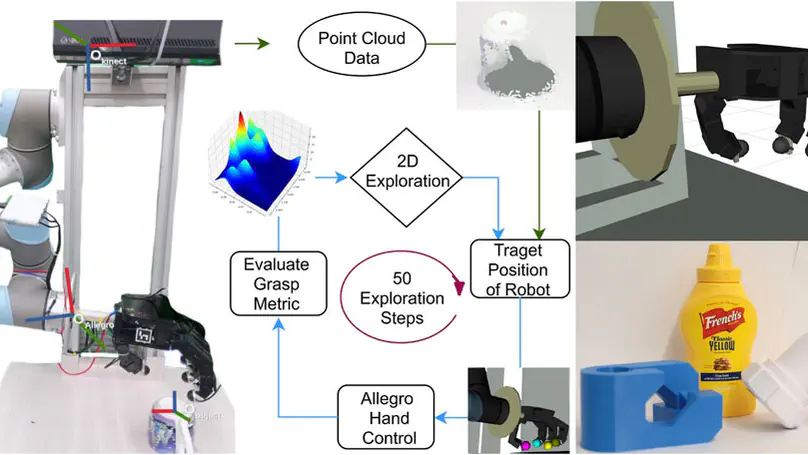
- Conducted research on learning by demonstration for robot manipulation by building a teleoperation platform and a demonstration segmentation system.
- Led the data science team, worked on several Machine Learning Projects central to raise $8.9M funding for the company to improve the analytics product
- Object Detection in Social Media Images. This project helped to provide analytics about influencer topics to the company platform.
- Fake Influencer Detection. This project tried to detect fake accounts and accounts using fake influencers to boost their metrics.
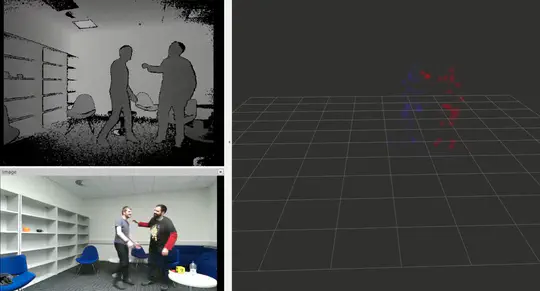
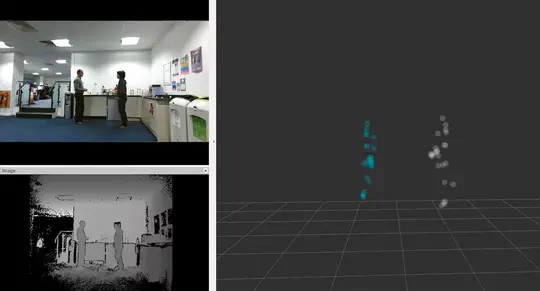
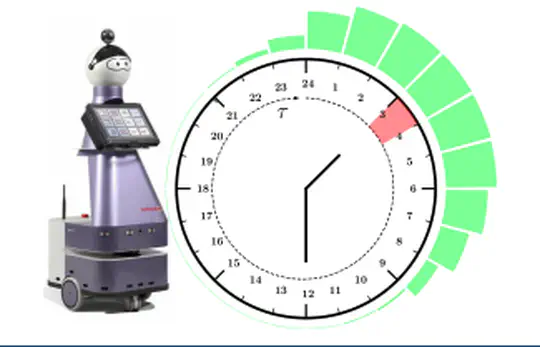
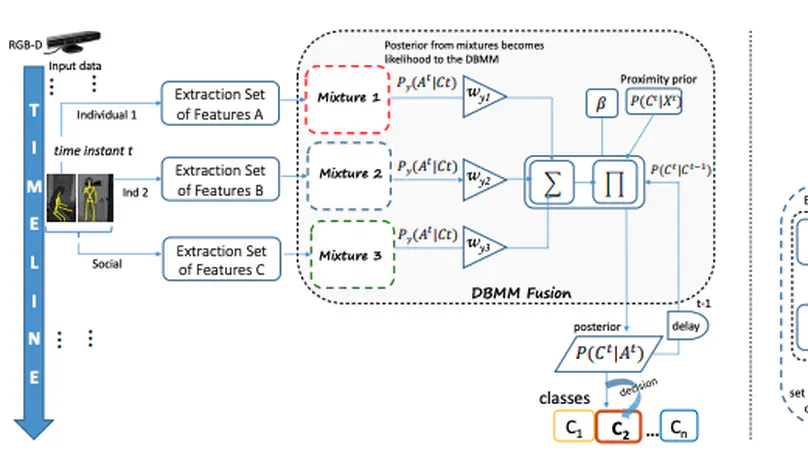
- Developed state-of-the-art Human Activity Recognition and Re-identification models used in the EU H2020 research projects ENRICHME and FLOBOT.
- Teaching Assistant for courses of Artificial Intelligence and Robotics.
- Automated daily BI maintenance tasks with a speed-up above 90% and developed SQL queries to generate BI reports.
Accomplishments
Recent Posts



Projects


Featured Publications
Recent Publications
Popular Topics
Contact
Hi Feel Free to send me an email!